CAPSTONE DESIGN SHOWCASE 2022
-
DAYS
-
HOURS
-
MINUTES
-
SECONDS
COMING SOON
Team members
Ma Yuchen (EPD), Chung Wah Kit (EPD), Wong Wen Kang (EPD), Yeo Wee Hian Sean (EPD), Huang He (ISTD), James Raphael Tiovalen (ISTD)
Instructors:
Kwan Wei Lek, Norman Lee Tiong Seng
Writing Instructors:
Teaching Assistant:

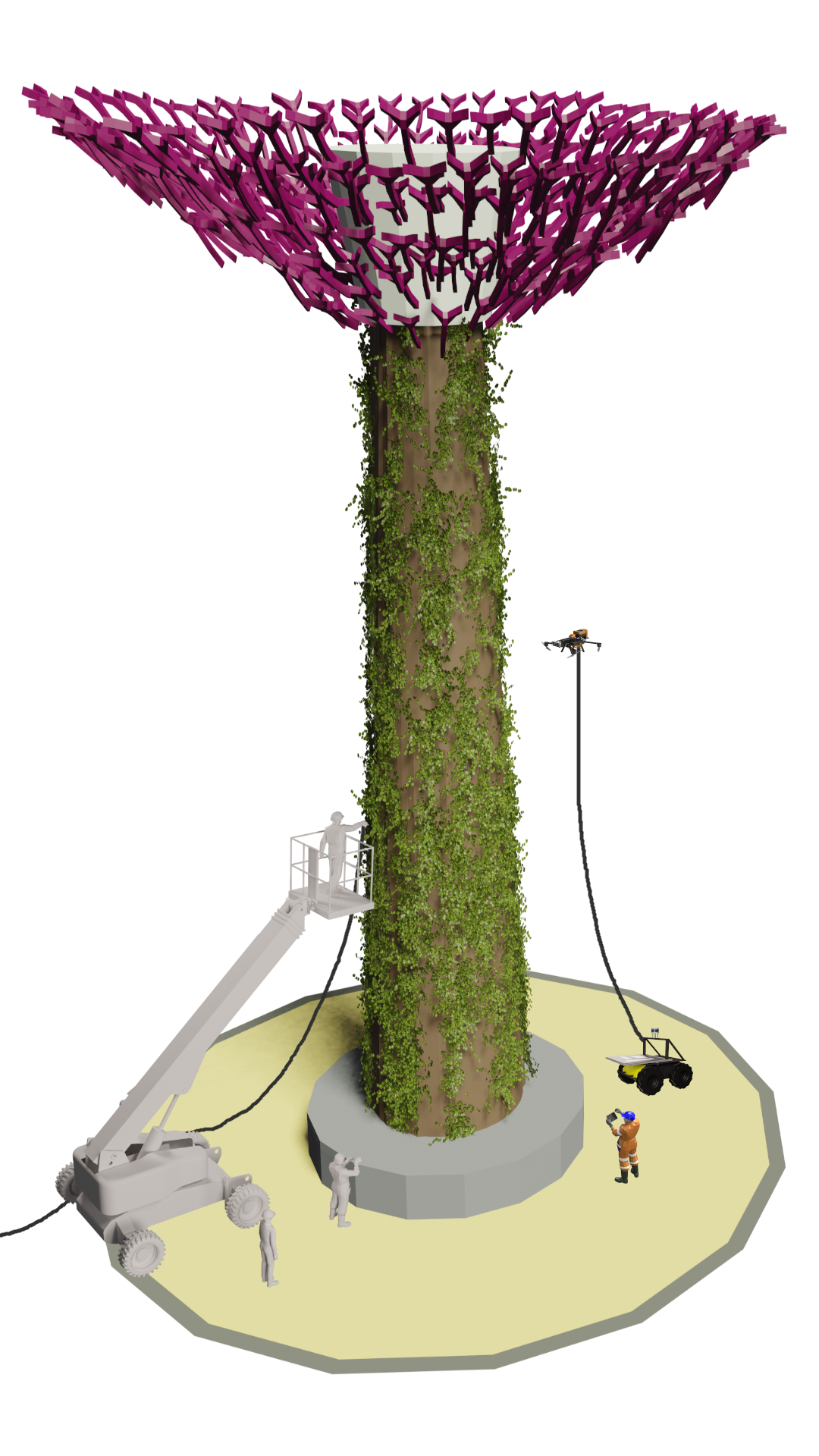
The following UAV and UGV would be connected by a tether that would carry power, ethernet, and even water.
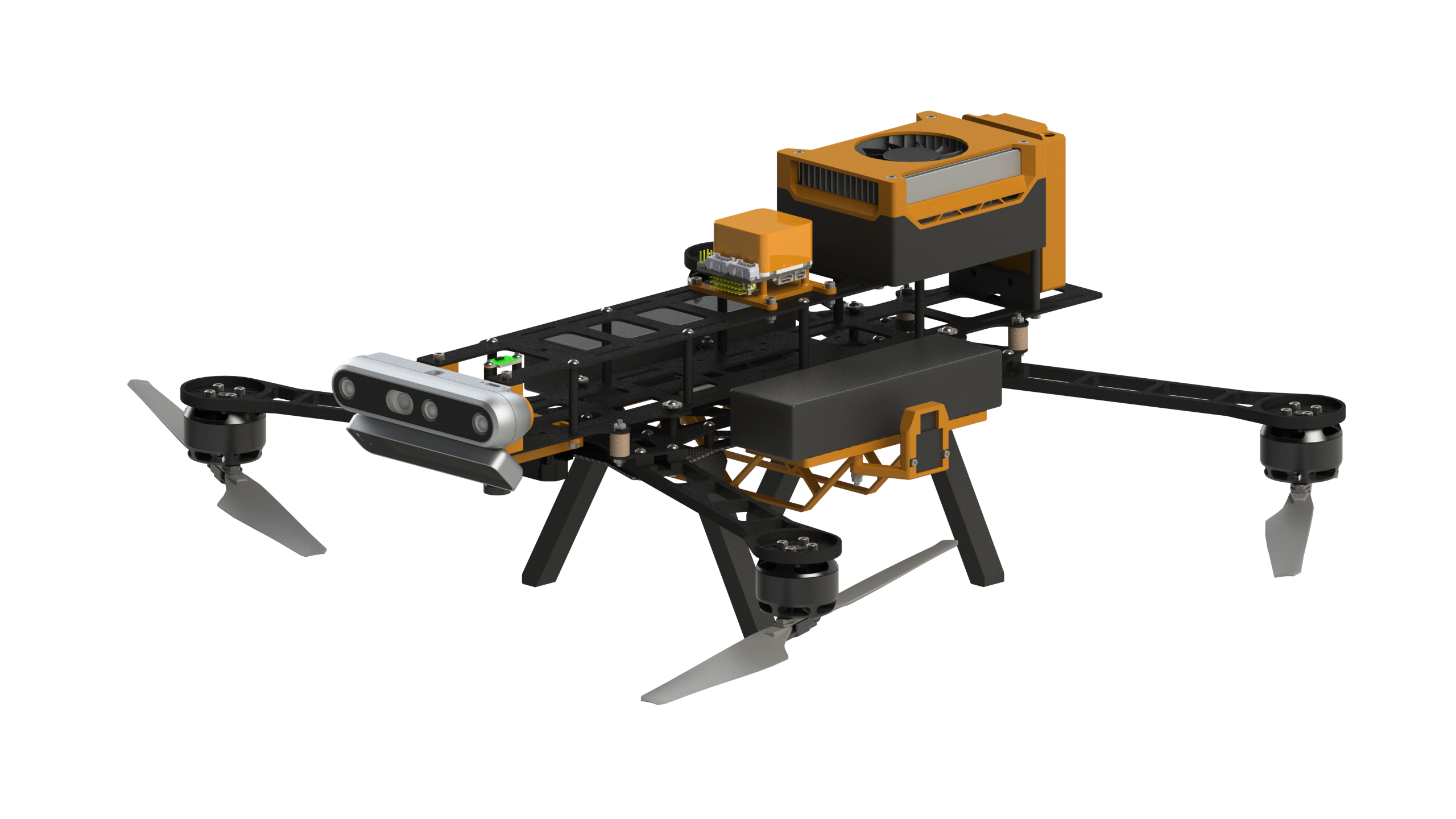
You can inspect the 3D model of our UAV here!

You can inspect the 3D model of our UGV here!
A simulation was created to test and develop the various packages that would be used in the collaboration of the UAV Hawk and the UGV Husky. In addition to that, the simulation could also be used to train operators in using the system.
The intuitive user interface allows single-person operations with operators performing one-click drone control. This removes the need for a highly-skilled drone pilot!
You can watch a demo of our user interface here!
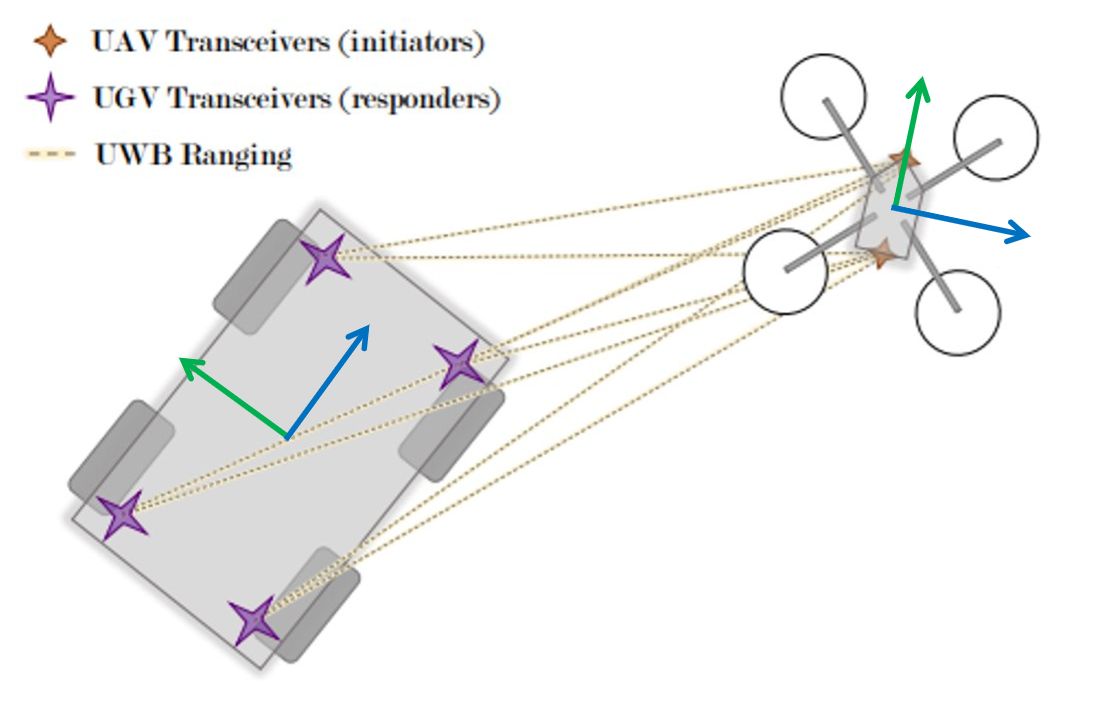
ArUco markers and ultra-wideband beacons are used to determine the relative positioning of the UAV and the UGV.
Dynamic obstacle avoidance and real-time path planning allow both the UAV and the UGV to avoid obstacles while performing their tasks.
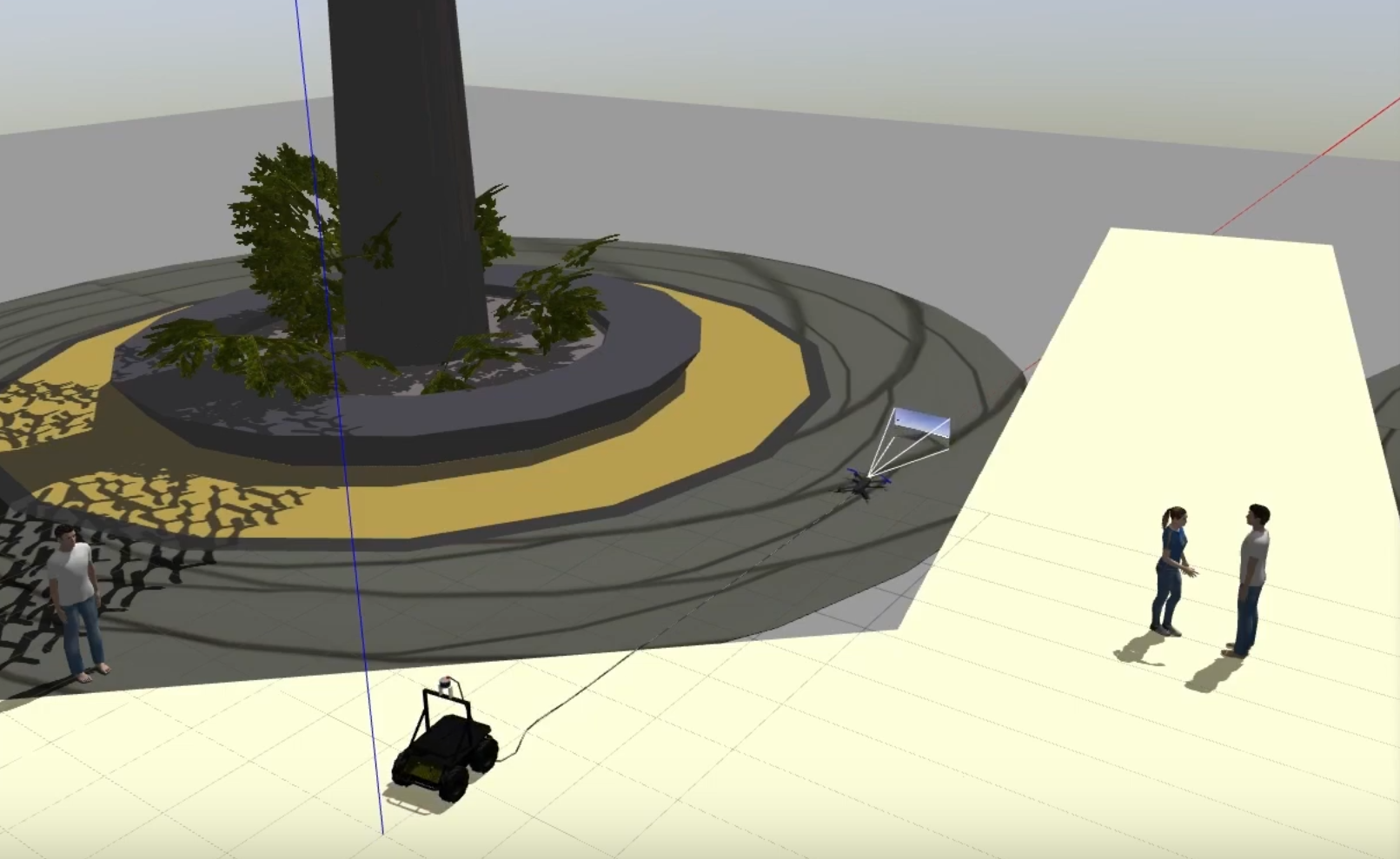
A simulation environment for our use case of cleaning Supertrees were developed to assist with the development and testing of both the UAV and the UGV.
The tether should be retractable so as to not obstruct the sensors and restrict the movement of both the UAV and the UGV too much. This would allow the system to achieve better relative positioning and localization accuracy.
More advanced algorithms such as Simultaneous Localisation and Mapping (SLAM) on the UAV or collaborative environment mapping would allow for greater autonomy and flight control assistance for users of the system.
Installing stronger processor units on both the UGV and the UAV would allow the system to perform more expensive computations and process large video streaming data without sacrificing performance.
More optimized video streaming and UI rendering techniques would allow users to experience less latency or FPS drops on the UI.









 Ma Yuchen
Engineering Product Development
Ma Yuchen
Engineering Product Development
 Chung Wah Kit
Engineering Product Development
Chung Wah Kit
Engineering Product Development
 Wong Wen Kang
Engineering Product Development
Wong Wen Kang
Engineering Product Development
 Yeo Wee Hian Sean
Engineering Product Development
Yeo Wee Hian Sean
Engineering Product Development
 Huang He
Information Systems Technology and Design
Huang He
Information Systems Technology and Design
 James Raphael Tiovalen
Information Systems Technology and Design
James Raphael Tiovalen
Information Systems Technology and Design
Ma Yuchen
Engineering Product Development
Chung Wah Kit
Engineering Product Development
Wong Wen Kang
Engineering Product Development
Yeo Wee Hian Sean
Engineering Product Development
Huang He
Information Systems Technology and Design
James Raphael Tiovalen
Information Systems Technology and Design